MIRO

Projekt je zameraný na vývoj mobilného inšpekčného systému, ktorý by umožnil na báze teleprítomnosti vykonávať monitoring a jednoduché manipulačné úkony v nebezpečnom prostredí. Uvedený systém umožňuje jednak znížiť, resp. úplne eliminovať nebezpečenstvo poškodenia zdravia človeka, ktorý takto interaguje s prostredím nepriamo prostredníctvom robota, a jednak umožňuje vykonať inšpekcie na miestach inak nedostupných.
V rámci projektu bol skonštruovaný mobilný robot MIRO(Mobilný Inšpekčný RObot), ktorý slúži ako testovacia platforma pre ďalší výskum v oblasti riadenia pohonov, plánovania trajektórie, navigácie, tvorby komunikačného rozhrania apod. Pozostáva z dvoch základných častí:
Operátorské stanovište - zahŕňa riadiaci počítač s prísluąným programovým vybavením, monitor pre vizualizáciu obrazu z mobilného robota, 3D helmu pre reprodukciu stereobrazu (zatiaľ nie je k dispozícii), ako aj ďalšie programové vybavenie pre konfiguráciu robota, spracovanie nameraných údajov a testovacie účely. Stanovište je umiestnené vo vzdialenom, bezpečnom prostredí. Operátor riadi mobilný robot prostredníctvom systému teleprítomnosti.
Mobilný robot - univerzálna kolesová resp. pásová platforma pre pohyb v štrukturovanom, resp. čiastočne neštrukturovanom prostredí, vybavená prídavným meracím systémom pre potreby konkrétneho monitoringu. Robot je vybavený vizuálnym systémom a senzorickým systémom pre bezpečnú činnosť v prostredí. Komunikácia prebieha rádiovým spojením, resp. po kábli. Robot môže byť podľa potreby vybavený manipulačným ramenom, ďalšími senzorickými systémami a pracovnými nástrojmi.
Autonómny prieskum - realizácia štandardných predprogramovaných úloh, ktoré sa opakujú v pravidelných časových intervaloch, resp. sú iniciované operátorom. Ide napr. o periodický monitoring určitých veličín, keď je k dispozícii mapa prostredia a trajektória pohybu robota je dopredu určená. Operátor sleduje robot a v kritických situáciách môže zasiahnúť.
Prieskum na báze aktívnej teleprítomnosti - typicky v novom neznámom prostredí, operátor ovláda mobilný robot riadiacimi povelmi na základe spätnej audio-vizuálnej informácie.
Ďalšie spôsoby činnosti - napríklad sledovanie čiary v prípade použitia v aplikáciách automatického transportu materiálu a surovín. Vo všetkých spôsoboch operácie robot dokáže rozpoznať a vyhnúť sa prekážkam.
Práce na robotovi stále prebiehajú, pričom súčasný stav opisuje následovná technická špecifikácia:
- Kolesová - trojkolka, predne koleso je hnacie i smerové
- DC motory s prevodom 1:98, 24V, 0,64Nm riadené pomocou PWM
- Odometrické senzory: precízny potenciometer 4000W 4W, inkrementálny snímač LARM 3600 inkr./otáčku
- 12V, 12Ah gelový akumulátor
- Max. rýchlosť 0.4m/s
- 8-bitový mikropočítač SIEMENS SAB 80C517
- Komunikácia prebieha po kábli i rádiovým spojením
- Riadenie: UHF dátové vysielacie/prijímacie moduly Radiometrix BiM-433-F, výkon 10mW, prenosová frekvencia 433MHz, prenosová rýchlosť 40Kbit/s na vzdialenosť 30m v budovách a 120m na voľnom priestranstve.
- Vizuálny systém: Rádiový modul VTQ Videotronic GigaLink, prenosová frekvencia 2.4 GHz, 5 kanálov.
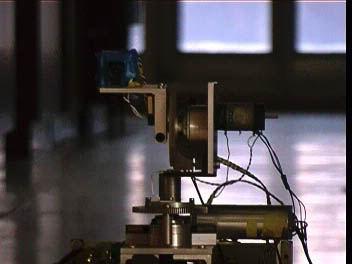
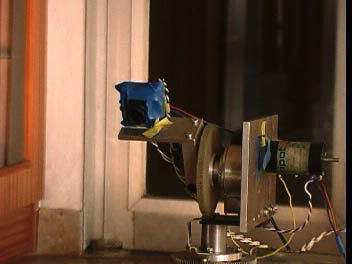
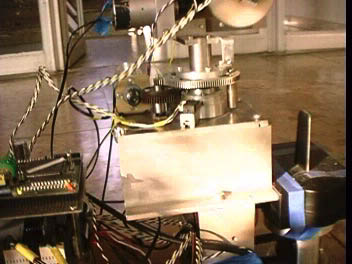
- Pan/tilt veža s DC motormi
- ČB kamera Watec 380 TV r.
- PC P500 + monitor + riadiaci softvér
- Video capture board AV MASTER
- Ovládací volant s pedálmi/Joystick
- Komunikačný modul
Kliknite na jednotlivé obrázky pre väčšiu verziu.